Lab Assignment 1: Modeling and Analysis of a DC motor : Control Systems Analysis and Design, Ireland
| University | University Of Galway (UOG) |
| Subject | Control Systems Analysis and Design Assignment |
Control Systems Analysis and Design Assignment
Lab Assignment 1: Modelling and Analysis of a DC motor
1. Introduction
A common actuator in control systems is the DC motor. It directly provides rotary motion and, coupled with wheels or drums and cables, can provide translational motion. The electric equivalent circuit of the armature and the free-body diagram of the rotor are shown in the following figure:
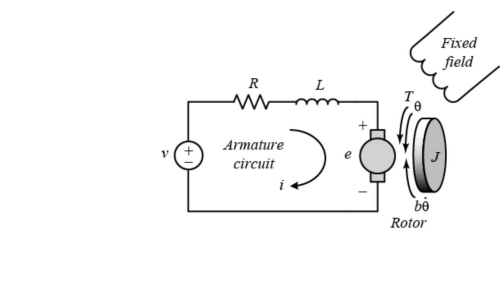
The input of the system is the voltage source (v) applied to the motor’s armature circuit, while the output is the rotational speed of the shaft, . The rotor and shaft are assumed to be rigid. We further assume a viscous friction model, that is, the friction torque in the motor is proportional to shaft angular velocity.
The physical parameters for the motor are:
J moment of inertia of the rotor
b motor viscous friction constant
Ke, electromotive force constant = Kt, motor torque constant = K, motor constant
R electric resistance
L electric inductance
ta_question_1
2. Model of armature-controlled motor:
In general, the torque generated by a DC motor is proportional to the armature current and the strength of the magnetic field. In an armature-controlled motor, the field current is constant and hence that the magnetic field is constant. Therefore, the motor torque, Tm, is proportional to only the armature current, i, by a constant factor Kt as shown in equation (1).
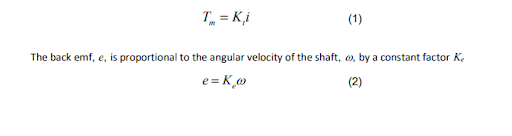
In SI units, the motor torque and back emf constants are equal, that is, Kt = Ke; therefore, we will use K to represent both the motor torque constant and the back emf constant.
Consider the electrical circuit (armature circuit):
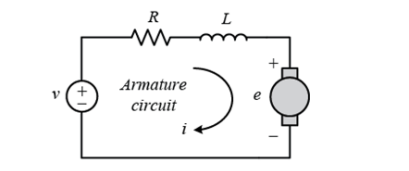
From Kirchhoff’s voltage law the input voltage minus the back emf is equal to the voltage drop across the resistor, VR, plus the voltage drop across the inductor, VL:
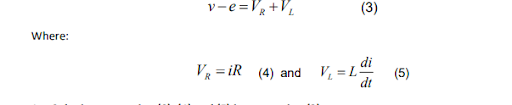
1. Substitute equation (2), (4) and (5) into equation (3)
2. Apply the Laplace Transform to the resulting equation (assume zero initial conditions) and show that this results in:
V s K s I s Ls R ( ) ( ) ( )( )
The sum of the torques acting on the rotor is equal to the rotor inertia, J, times its angular acceleration (where acceleration is the rate of change of angular velocity):
T J =

The torques acting on the motor are the motor torque resulting from the armature current and the damping torque due to the viscous friction damping (which opposes the motor torque):
3. Substitute equation (7) into equation (8)
4. Apply the Laplace Transform to the resulting equation and show that this is equal to:

5. Substitute equation (9) into equation (6) and show that the LTF model in terms of output
(angular velocity) over input (voltage) is:

3. Analysis of the LTF model You will be assigned individual motor parameters through the ‘CSAD401 Assignment 1 Quiz’ on the Moodle page.
Get Solution of this Assessment. Hire Experts to solve this assignment for you Before Deadline.
- Rearrange the characteristic equation of the LTF into the standard form (where the s2 coefficient has a value of one), and hence determine the natural frequency and damping ratio of your system. Determine whether your motor is overdamped, critically damped or underdamped.
- etermine the location of the system poles.
- Calculate the percentage overshoot, 100% rise time and the 2% settling time of your motor.
- Apply the Final Value Theorem to calculate the steady state motor speed value achieved by the motor if a unit step input is applied.
4. Matlab Simulation
- Model your motor as a Transfer Function in Matlab
- Use the ‘pzmap’ command to generate a pole-zero map of the system
- Use the ‘step’ command to generate the step response of the system and to analyse the percentage overshoot, 100% rise time, 2% settling time and steady state motor speed.
5. Submission
Submit the results of your assignment using the ‘CSAD401 Assignment 1’ Quiz on the module
Moodle page.
Q1. Show your development of the LTF model given in equation (10) (You are required to upload an image or document file.)
Q2/3. Your motor parameters are defined in this question. For the parameters you have been given, enter your values of damping ratio, natural frequency and pole locations, 100% rise time, settling time, percentage overshoot and steady state speed of the motor. Show your calculations clearly.
Q4. Upload your ‘pole zero map’ and step response plot generated by MATLAB (show the rise time, settling time and percentage overshoot on the step response plot). Compare the Matlab results with your own calculations.
Q5. Confirm that the work submitted is entirely your own individual work. Instances of plagiarism will be dealt with under the IT Sligo plagiarism policy.
Stuck in Completing this Assignment and feeling stressed ? Take our Private Writing Services
Need assistance with your Control Systems Analysis and Design Assignment? Enjoy affordable, high-quality services with our Ireland assignment writing help! You can easily pay someone to do my assignment for me, and our experts are here to provide exceptional support. If you're looking for a dissertation helper online, we offer 100% human-written content with an A+ guarantee, ensuring on-time delivery and plagiarism-free content. Contact us today and achieve the grades you deserve!
